Механика твердого тела.
Твердое тело, которое может принимать различные ориентации в пространстве, можно считать состоящим из материальных точек. (Это просто математический прием, позволяющий расширить применимость законов движения материальных точек, но не имеющий ничего общего с гипотезой атомного строения вещества.) Поскольку материальные точки такого тела будут двигаться в разных направлениях с разными скоростями, приходится прибегать к процедуре суммирования.
Рассмотрим систему, изображенную на рис. 7. Сила F, приложенная к тросу, заставляет массу, имеющую форму цилиндра, изменять свою скорость вращения. Будем характеризовать ориентацию цилиндра углом q между радиусом, проведенным из центра цилиндра в некоторую точку на нем, и произвольно выбранным направлением отсчета. Угол q измеряется в радианах; один радиан (примерно 57°) есть центральный угол, стягивающий дугу длиной r на окружности радиуса r. Таким образом, произвольный угол q стягивает дугу s, равную rq, а вся окружность сoответствует углу 2p радиан. Скорость любой точки на окружности равна
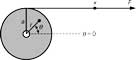 (5.25 Кб) (5.25 Кб)
где под q /t понимается скорость, с которой изменяется угол q при вращении. Обозначив эту угловую скорость через w, мы наряду с равенством
s = rq
получим
v = rw.
Нетрудно
вычислить кинетическую энергию цилиндра, вращающегося вокруг неподвижной
оси с угловой скоростью w.
Обозначим через m
одну из материальных точек цилиндра, расположенную на расстоянии rm
от оси. Ее кинетическая энергия равна 1/2m(rmw)2, а полная кинетическая энергия всех материальных точек может быть представлена в виде суммы

или
T = 1/2Iw2,
где
 .
Величина I, называемая моментом
инерции, зависит от распределения массы в цилиндре и является его характеристикой.
Момент инерции можно вычислить путем интегрирования, и для однородного
цилиндра он равен 1/2Ma2,
где M
– масса цилиндра, а a –
его радиус. Если цилиндр вращается свободно и нет сил, которые совершали
бы над ним работу, то из закона сохранения энергии следует, что его кинетическая
энергия остается постоянной. В таком случае постоянна и величина w, и мы имеем вращательный аналог первого закона Ньютона. .
Величина I, называемая моментом
инерции, зависит от распределения массы в цилиндре и является его характеристикой.
Момент инерции можно вычислить путем интегрирования, и для однородного
цилиндра он равен 1/2Ma2,
где M
– масса цилиндра, а a –
его радиус. Если цилиндр вращается свободно и нет сил, которые совершали
бы над ним работу, то из закона сохранения энергии следует, что его кинетическая
энергия остается постоянной. В таком случае постоянна и величина w, и мы имеем вращательный аналог первого закона Ньютона.
Предположим
теперь, что к тросу, намотанному на цилиндр, на короткое время от t0
до t
прилагается сила F
и за это время точка, отмеченная на тросе, проходит расстояние от x0
до х,
а цилиндр поворачивается на угол от q0
до q,
причем
x – x0 = a(q –q0).
Работа, совершенная при этом силой, равна:
U = F(x – x0) = Fa(q – q0),
и точно так же, как при выводе выражения U = 1/2mv2 – 1/2mv02, мы можем выразить угловое перемещение через среднюю угловую скорость на этом интервале:
q – q0 = 1/2(w +w0)(t – t0),
так что
U = 1/2Fa(w +w0)(t – t0).
За счет этой работы кинетическая энергия цилиндра изменяется от T0 до T, так что
U = 1/2 I(w2 – w02).
Приравнивая два последних выражения и производя упрощения, получаем выражение
напоминающее формулу для ускорения частицы. Поэтому мы можем ввести угловое ускорение
и тогда для малого интервала от t0 до t получим L = Ia, т.е. вращательный аналог второго закона Ньютона, в котором величина Fa, вызывающая вращение, обозначена через L. Она называется вращающим моментом.
Изложенное
можно обобщить на случай, когда отсутствуют неподвижные оси и тело свободно
вращается в пространстве. В этом случае имеются три момента инерции, относящиеся
к «главным осям». Мы не будем углубляться в рассмотрение этих вопросов.
Однако можно вывести второй основной принцип статики для случая твердых
тел. Пусть силы F1
и F2,
приложенные к пластине, которая может вращаться, таковы, что вращения
нет (рис. 8). Равновесие означает отсутствие углового ускорения, и поэтому
полный вращающий момент равен нулю. Моменты сил F1
и F2
компенсируют друг друга при условии:
 (5.23 Кб) (5.23 Кб)
F1a1 = F2a2,
т.е. получается закон рычага, известный со времен Архимеда. Удалим ось и заменим ее действие третьей силой, как показано на рис. 9, предполагая, что весом пластины можно пренебречь. Для равновесия всех этих сил нужно, во-первых, чтобы пластина не перемещалась и, следовательно, компоненты сил удовлетворяли условию векторного равновесия и, во-вторых, чтобы не было вращения, т.е. выполнялось выведенное только что соотношение. Оба эти принципа составляют основу теории строительной механики и важны при проектировании мостов и зданий.
 (4.05 Кб) (4.05 Кб)
Проводившиеся выше рассуждения упрощаются, если пользоваться обозначениями математического анализа, в которых подразумевается предельный переход (t ® t0), так что нет необходимости все время говорить о нем. Ньютон первым применил методы дифференциального и интегрального исчисления при решении физических задач, а последующее развитие механики как науки было делом таких математиков, как Л.Эйлер, Ж.Лагранж, П.Лаплас и К.Якоби, каждый из которых находил в ньютоновской механике источник вдохновения для своих математических изысканий.
назад
|