Динамика
и статика в трех измерениях.
Чтобы
обобщить предыдущие результаты на случай трех измерений, потребуется ввести
лишь еще один принцип, который заключается в том, что законы Ньютона справедливы
для движения вдоль каждой оси координат независимо от движения по другим
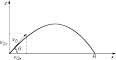
осям. Так, если пренебречь сопротивлением воздуха, снаряд вдоль оси z
движется с замедлением (рис. 4), а вдоль горизонтальной оси – без
внешних сил и без ускорения. Обозначим через t
время полета. Половину этого времени снаряд поднимается, а остальное время
опускается. Таким образом, его скорость по вертикали изменяется на v0z
за время 1/2t,
так что
 (5.02 Кб) (5.02 Кб)
v0z
= 1/2gt,
t
= 2v0z/g,
и
все это время горизонтальное движение происходит со скоростью v0x
и без ускорения. Таким образом, дальность полета равна:
R
= v0xt
= 2v0xv0z/g.
Если
v0
– начальная
скорость, а q
– угол возвышения, то
легко понять, что v0x
= v0cosq
и v0x
= v0sinq
, так что
и максимальное значение этой величины, равное v02/g, достигается при q = 45°.
В
приведенном примере начальная скорость v0
характеризовалась и величиной, и направлением. Такие величины называются
векторами, а величины v0x
и v0z
– соcтавляющими или компонентами вектора. (Обычно
векторы обозначают полужирными буквами.)
Предположим теперь, что в трехмерном
пространстве к покоящейся материальной точке приложено несколько сил,
под действием которых она остается в покое. О подобной системе сил говорят,
что они уравновешены, и законы динамики позволяют определить, каким должно
быть соотношение между ними. Если материальная точка покоится и сохраняет
это состояние, ее ускорения вдоль осей x,
y или z
равны нулю, а поскольку ускорения вдоль этих осей не зависят друг от друга,
полные силы в каждом из этих трех направлений тоже должны быть равны нулю.
(Полная сила, действующая на материальную точку вдоль оси х
и стремящаяся привести ее в движение вдоль этой оси, равна сумме x-компонент всех действующих сил; то же самое справедливо и для двух других осей.)
Предположим, что имеются только две
силы с компонентами F1x,
F1y,
F2x
и F2y
(для упрощения рисунка ограничимся двумя измерениями). В случае равновесия имеем
F1x
+ F2x
= 0 и
F1y
+ F2y
= 0,
или
F1x
= –F2x
и
F1y
= –F2y
.
Так
как F1x
и F1y
– компоненты вектора силы F1,
и аналогично F2x
и F2y
– компоненты вектора F2, то возникает ситуация, показанная на рис. 5, где векторы двух уравновешивающих друг друга сил изображены равными по величине и направленными в противоположные стороны.
 (4.61 Кб) (4.61 Кб)
Предположим,
теперь, что имеются три вектора, причем F3
уравновешивает F1
и F2.
В этом случае F1x
+ F2x
+ F3x
= 0, F1y
+ F2y
+ F3y
= 0.
Эти соотношения можно переписать в виде
F1x
+ F2x
= –F3x,
F1y
+ F2y
= –F3y.
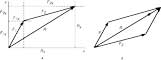
Сравнение с аналогичными соотношениями в случае двух сил показывает, что если мы введем новый вектор R с компонентами
Rx
= F1x
+ F2x,
Ry
= F1y
+ F2y,
который называется равнодействующей сил F1 и F2, то R будет в точности уравновешивать F3. Таким образом, сила R воспроизводит суммарное действие сил F1 и F2 в том смысле, что если удалить силы F1 и F2, заменив их силой R, то материальная точка по-прежнему останется бы в равновесии. Все сказанное представлено графически на рис. 6,а, где показано сложение компонент. На рис. 6,б вспомогательные линии убраны и оставлены только векторы. Последний рисунок называется параллелограммом сил. Он иллюстрирует один из фундаментальных принципов статики, который, как мы видели, является следствием динамической теории. Этот принцип был установлен С.Стевином (1548–1620), который показал, что если бы это было не так, то имелась бы возможность создать машину, которая производила бы работу, даже если бы к ней не подводилась энергия. Сегодня мы рассматривали бы такую машину как пример нарушения закона сохранения энергии; для Стевина это просто противоречило здравому смыслу, но при этом положения статики тоже обосновывались динамическими соображениями.
 (8.35 Кб) (8.35 Кб)
назад
дальше
|